2.1 KiB
FloatPUMP - Firmware Repository
This repository contains the necessary files to completely build the firmware for the FloatPUMP controller. The toolchain used in this project is built up using docker. The following sections describe how to setup the jetbrains CLion IDE to automatically use the included docker image to build the project. It also contains some description on how to use OpenOCD to flash the controller using a STLink-V2 Programmer.
Toolchain Setup
This chapter describes how to setup the CLion IDE to use the toolchain built with docker.
Prerequisites
- Install jetbrains CLion IDE
- Install Docker
- Open the Project by clicking New project from version control
Build the docker image
You can build the image by yourself. Alternatively you can pull the image from the robtor.de registry. Open a command line and enter the subdirectory build-tools. There run the follwing command to build the docker image:
docker build -t dev-arm-stm32:latest .
As an alternative you could open the Dockerfile in this directory using CLion and build it directly out of the IDE!
Pulling the image
This method is currently not supported. Coming soon...
Configure toolchain
First enter the Settings dialog in CLion while the floatpump-firmware project is opened.
Under Build, Execution, Deployment > Toolchain add a new toolchain and choose the type docker.
Now setup everything as depicted in this screenshot:
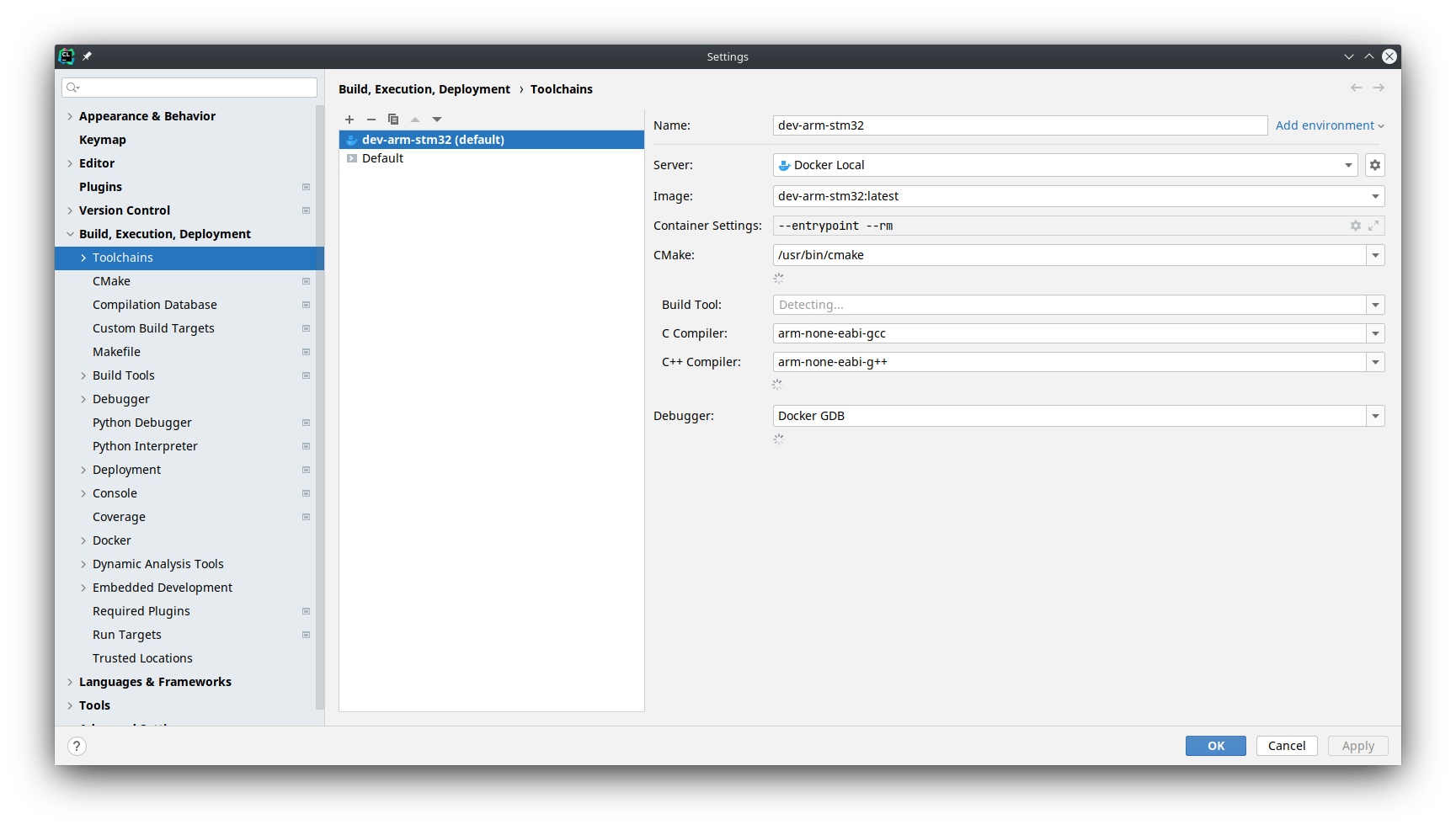
If you named the image different than dev-arm-stm32:latest, choose the correct image corresponding to your name.
Usually now the correct CMake build targets should appear under Build, Execution, Deployment > CMake.
Configure OpenOCD
To configure OpenOCD for directly flashing and debugging out of CLion go to the BuildTargets dropdown in the
header line and click on Edit configurations.
There add a new configuration for OpenOCD and enter the following proerties:
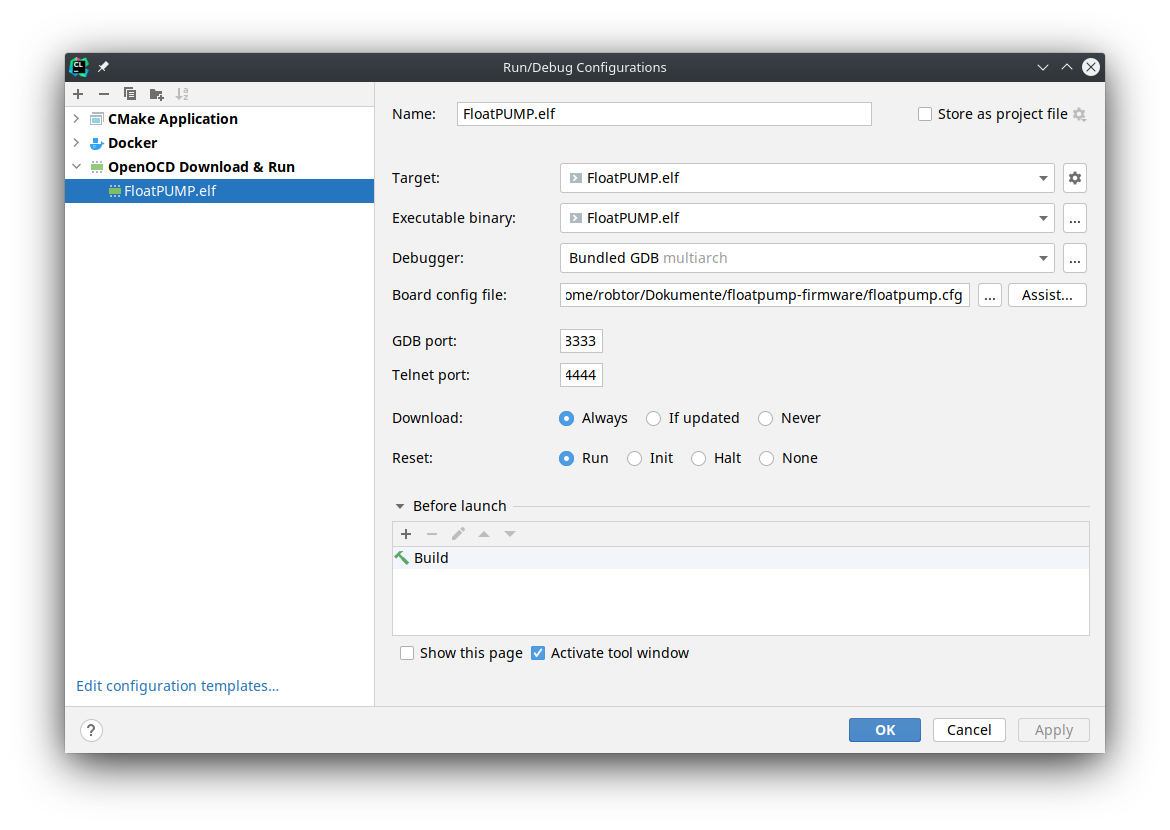 As
As Board config file chosse the correct floatpump.cfg file contained in the project root dir.